Overview


|
Overview |
|
|
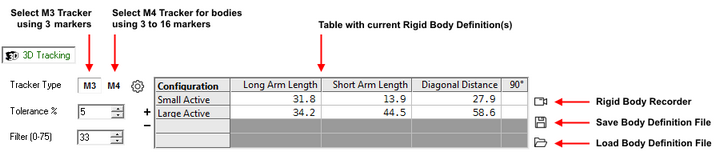
The MaxREAL Rigid Body Recorder is accessed from the Workspace 3D Tracking Tab.
If the Rigid Body Recorder has not yet been installed, the Recorder icon will look like this
Installing the optional Rigid Body Recorder
Saving and Loading Body Definition Files
The current body definition table can be saved as a Body Definition File. These files can then be loaded again when needed. The current definitions will always be reloaded when you start MaxREAL. Note that the entire table will be saved so if you have multiple bodies defined, then all bodies will be saved. When loading a Body Definition File, you have the option to append the file to the current definitions by checking append in the Open Body File Dialog.
BD3 Body Definition File Format - Used with M3 Tracker. BD4 Body Definition File Format - Used with M4 Tracker.
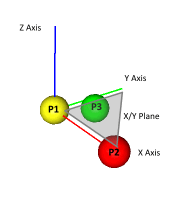
M3 Rigid Bodies
These rigid bodies consist of 3 markers forming a triangle. Each side in the triangle must be of different lengths so that the identification process can identify each of the markers. Make sure there is at least a minimum of 10-15% length difference between the sides. Generally, the more, the better. You can enter the lengths manually in the table or you can use the body recorder to record and measure the lengths.
The local coordinate system is align as follows:
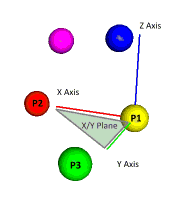
M4 Rigid Bodies
A M4 rigid body should have at least 4 markers and can handle up to 16. It can handle 3 marker bodies but it is strongly recommended that there is at least 4 markers. The 4 markers should be configured so they're not all in a plane.They should also be mounted in such a way so there will be no ambiguity. For example, the system would not be able to resolve the pose of a body with 8 markers in the corners of a cube.
The local coordinate system is align as follows:
|