Rotation Analysis


|
Rotation Analysis |
|
|
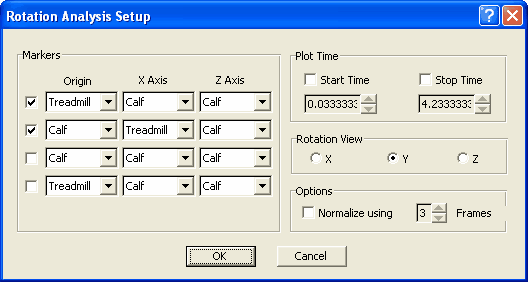
The Rotation Analysis allows you to determine the X, Y and Z (or yaw, pitch and roll) orientation of a segment or rigid body. A rigid body is defined by using 3 markers. These 3 markers define a local coordinate system. The first marker defines the origin, the second marker defines the direction of the X axis and the 3rd marker defines the direction of the Z axis of this local coordinate system. The Rotation Analysis graph describes the orientation of the defined rigid body versus the global coordinate system defined by the 3D calibration procedure. You can graph the rotation (orientation) of up to 4 rigid bodies at a time.
You can graph the rotation data relative to the starting position by selecting the Normalize option. This option will calculate an average of the first n frames and then subtract this rotation from each consecutive frame creating a change of rotation graph.
Note; Rotation Analysis is only available when a 3D file has been opened.
Click on any item in the picture below for more information.
|