Projected Points


|
Projected Points |
|
|
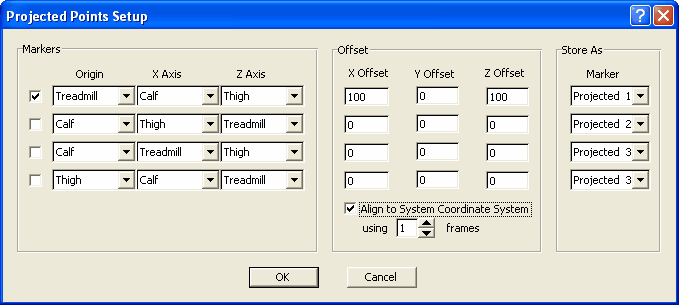
The Projected Points function allows you to determine the amount of movement of an unmarked point. Such an example would be to analyze the amount of movement of a specific engine part that could not have a marker attached since that target would not be seen in multiple camera views. However, by knowing the offset in the X, Y and Z direction from a specific origin, the amount of movement of the unmarked point can be quantified.
As with Rotation Analysis, a set of markers is located in the field of view to mark an origin and two orthogonal planes that match the X and Z planes in the global coordinate system. The origin can be a marker arbitrarily chosen that remains in the field of view of all cameras. The offsets from that origin are then determined. These values are then input as the offsets in the three planes. This new point can then be saved as a new marker. The coordinates of the new marker are then appended to the original data file. This point can then be analyzed as any other marker.
Note; Projected Points is only available when a 3D file has been opened.
Click on any item in the picture below for more information.
|